新型无导轨全位置焊接机器人顺利完成工艺试验
来源:重点实验室
发布日期:2008-11-27 浏览次数:
受北京市教委科技成果转化项目支助,我校光机电装备技术北京市重点实验室成功研制出新型无导轨全位置焊接机器人,并在输水管道现场焊接工艺试验中获得成功。
近期,我校与北京市自来水集团瑞洲工贸有限公司合作,新型机器人在北京市朝阳化工设备厂进行了输水管道现场焊接工艺试验。工艺试验所用输水管道管径为1020mm、壁厚12mm。完成了此管道的全位置全自动打底焊试验及填充焊、盖面焊试验。试验结果表明,此新型无导轨全位置焊接机器人焊接效率高、焊接质量好、焊缝成形好,能满足自来水输水管道现场安装作业需求。此外,在完成此试验的同时,还进行了GDC-4管道全位置焊接机器人工艺试验。
据介绍,与BIPT-5全位置焊接机器人相比,此新型无导轨全位置焊接机器人运动机构进行了全新设计,行走更稳定,并具有一定程度的越障能力;采用新型位置检测传感机构,无需CCD光电跟踪传感器,可进行管道及球面焊缝轨迹自动跟踪;操作更简便,具有打底焊能力。此设备在球罐、储罐、高炉、压力容器、管道等制造安装领域具有很好的应用前景。

新型无导轨全位置焊接机器人现场工艺试验
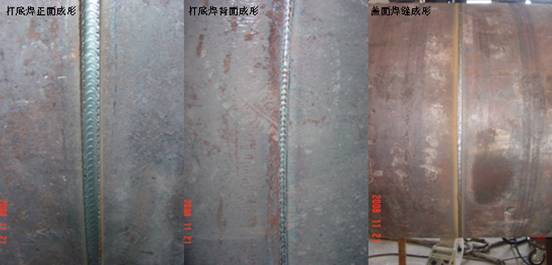
新型无导轨全位置焊接机器人现场工艺试验焊缝成形
(光机电装备技术北京市重点实验室)