

URT项目
2014年优秀URT成果展示-两轮自平衡电动车控制系统研究与设计
发布日期:2014-04-22

项目名称:两轮自平衡电动车控制系统设计与实现
n 基本信息
|
|
课题来源: |
教师科研 |
|
|
专业要求: |
自动化 |
|
|
指导教师: |
蓝波(副教授) |
|
|
成员名单: |
赵双喜(项目负责人,自Z09)、谢辰希(成员,自102)、梅俊勇(成员,机09)、周义(成员,自102) |
n 项目简介(300~500字)
两轮平衡车作为一种交通工具,在日常生活中扮演着越来越重要的作用,方便、快捷、充满趣味。另外作为一种轮式平衡机器人,有着极高的研究价值。无论是从传感器领域还是数据采集以及控制理论方面,它都是很好的研究范例。随着社会的发展,两轮自平衡系统的研究与应用必将得到越来越多的重视。
n 成果简介
2013年5月25-26日,本项目代表学校参加了由北京市教委主办、北京交通大学承办、北京工业大学协办的第二届北京市大学生科学研究与创业行动计划项目成果展示与经验交流会。项目负责人赵双喜、成员梅俊勇参会。
|
|
这是两轮自平衡电动车电路的几个部件分别是马达驱动和主控制器部分,通过主控制器采集信号,处理信号,然后将控制信号输出给马达驱动器,,实现对车体的控制。图1为马达驱动器最终成品的正面;图2为马达驱动最终成品的背面。 |
|
图1 |
|
|
|
|
|
图2 |
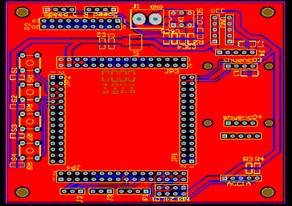
图3展示主控制器的PCB图。 |
|
|
|
|
图3 |
|
|
|
图4为自平衡电动车最终的成品。 |
|
图4 |
|
|
|
图5为项目组成员在第二届北京市大学生科学研究与创业行动成果交流会上。(右五为项目负责人赵双喜、右六为项目成员梅俊勇) |
|
图5 |
|


注:本项目成果演示有视频资料,由于容量比较大,如需观看,可联系指导老师蓝波,邮箱:lanbo@bipt.edu.cn